Poolautomaatne paneelipainutaja EMBC 1402
toodete spetsifikatsioon
| Ei. | Nimi | Parameeter | Üksus |
| 1 | Max.pikkus | 1400 | mm |
| 2 | Max.laius | 1400 | mm |
| 3 | Min.Painde pikkus | 200 | mm |
| 4 | Min.painde laius | 260 | mm |
| 5 | Maksimaalne painde paksus (MS, UTS410N/mm²) | 1 | mm |
| 6 | Minimaalne painde paksus (MS, UTS410N/mm²) | 0.5 | mm |
| 7 | Maksimaalne paindekõrgus | 170 | mm |
| 8 | Ülemise pressi pikkuse reguleerimise režiim Käsitsi | ||
| 9 | Keskmine energiatarbimine | 2.2 | KW |
| 10 | Kaal | 15 | T |
Omadused ja põhistruktuur
Mis puudutab masinate projekteerimist ja tootmist, siis Hebei Hanzhi CNC Machinery Co., Ltd.keskendub peamiselt järgmistele punktidele:
1. Turunduskontseptsioon, mis taotleb praktilisust ja säästab kasutaja iga senti.
2. Väga usaldusväärne ja täpne disainikontseptsioon.
3. Kvaliteetne tooraine, ostetud osad ja peen töötlemistehnika.
4. Rohkem rõhku kasutuslihtsusele ja hooldusele ning ohutusele.
5. Madal hooldusmäär ja hoolduskulud samas tööstuses.
raami
A. 3D lõplike elementide mudeli koostamine: väljatöötatud ja projekteeritud 3D tahke mudeli põhjal koostatakse arvutuste jaoks dünaamiline lõplike elementide mudel.Mudel võtab arvesse jõuülekandeühenduse põhikomponente.Ühenduse kaudu kantakse jõud üle laagrile ja seejärel tehakse laagri tugevusanalüüs.
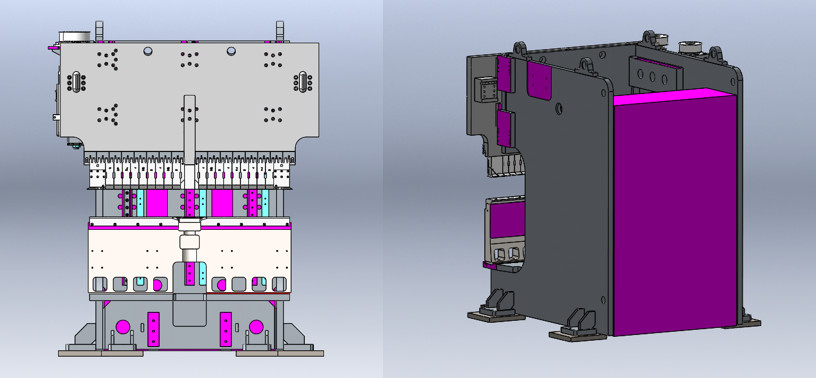
Joonis 1 Paneelpainutaja Tervikliku masina lõplike elementide dünaamiline modelleerimine
B. Staatilise analüüsi tulemuste analüüs: aeglase töötluskiiruse tõttu saab tugevusanalüüsi taandada staatiliseks probleemiks.Plaadi survekoormuse ja lõikepea vertikaalsuunas paindekoormuse põhjal on pinge ja deformatsiooni tulemused näidatud allpool.Maksimaalne pinge ilmneb keha kurgus maksimaalse pingega 21,2 mpa ja maksimaalne deformatsioon keha ülemises otsas maksimaalse deformatsiooniga 0,30 mm.
Vastavalt raami lõplike elementide analüüsi tulemustele valiti materjaliks Q345 teras;võeti vastu süsinikdioksiidi kilbi keevitamine;keevitamisel tekkivate pingete kõrvaldamiseks viidi läbi karastustöötlus;tagades nii seadmete täpsuse, stabiilsuse ja suure jäikuse pikaajaliseks tööks.
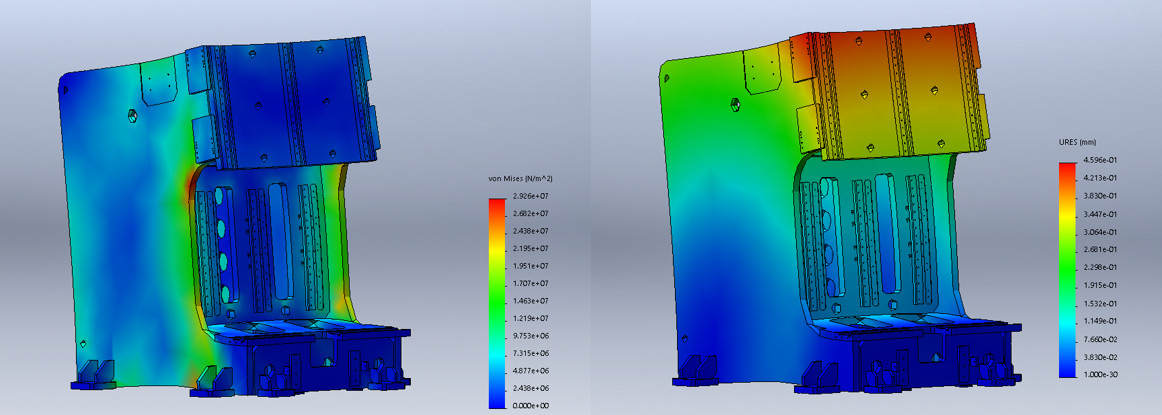
Joonis fig 2 raami pingenihke deformatsiooni analüüsi tulemused
Ülemine ram
See osa koosneb peamiselt liugurist, suure pöördemomendiga juhtkruvist, reduktorist, juhtrööpast, servomootorist jne.Peamist ajamit juhib servomootor ja juhtimisrežiimiks on servo sünkroonjuhtimine, mis võib tõhusalt tagada positsioneerimise täpsuse, kiire kiiruse ja kõrge juhitavuse.Juhtkruvi ja juhtrööpa määrimine võtab kasutusele automaatse määrimise ning määre on 00#, mis tagab juhtkruvi ja juhtrööpa kasutusea ja täpsuse pikaks tööks.
Ülemise liuguri staatilise analüüsi tulemused: ülemise tabeli pingenihke neerudiagramm näitab, et maksimaalne pinge on ülemises osas, maksimaalne pinge on 152mpa, maksimaalne deformatsioon on ülemise tabeli ülemises otsas, maksimaalne deformatsioon on 0,15 mm
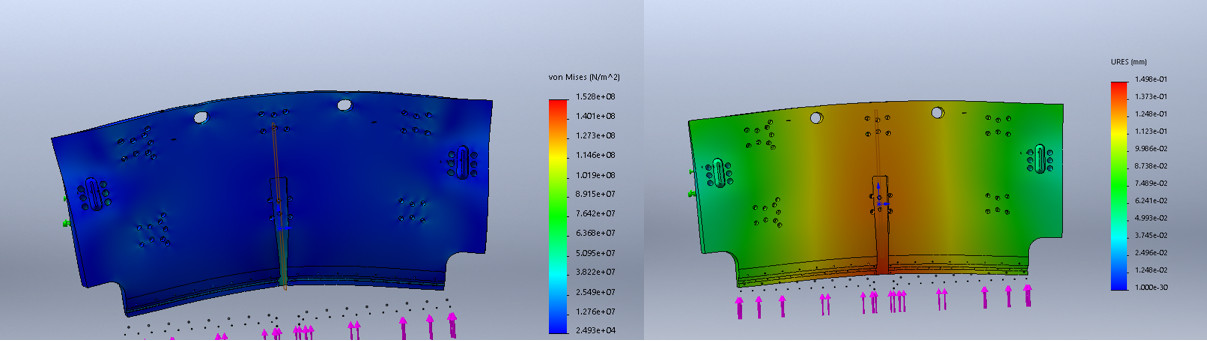
Joonis fig 3 rammi pingenihke analüüsi tulemused
Vastavalt rammi lõplike elementide analüüsi tulemustele valiti materjaliks Q345 teras;kasutati CO2 varjestatud keevitust;keevitamisest tingitud pingete kõrvaldamiseks tehti karastustöötlus;tagades nii seadmete täpsuse, stabiilsuse ja suure jäikuse pikaajaliseks tööks.
Painutusüksus
Painutusseadme jõuajami osa juhib servomootor ilma hüdraulikasüsteemita, millel on suured eelised komponentide kulumise ja ülekande efektiivsuse vähendamisel kooskõlas propageeritud energiasäästu ja keskkonnakaitse poliitikaga. riigi poolt.
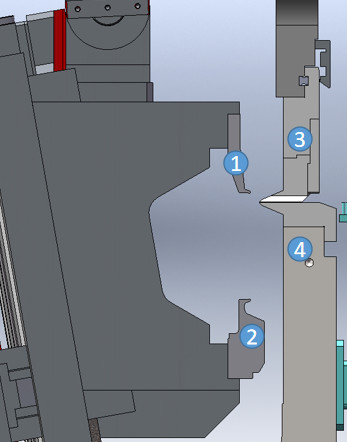
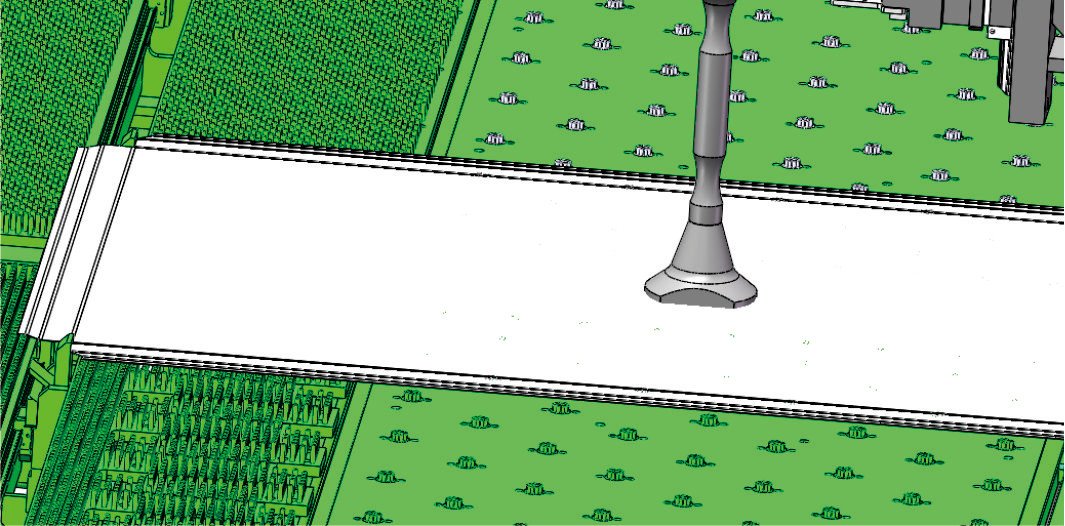
Vastavalt lehe teabe seadistusele arvutab süsteem automaatselt ülemise pressnoa 3 asendi ja kontrollib lehe fikseerimiseks ülemise pressnoa 3 ja alumise pressnoa 4 vahelist kaugust;vastavalt süsteemi seadistusele, olenemata sellest, kas see painutamine toimub üles või alla, juhitakse alumist pressnuga 2 või ülemist pressnuga 1 nii, et see liiguks kiiresti painutusasendisse;vastavalt erinevatele seadistusnurkadele juhitakse painutusnuga liikumist arvutatud asendisse patenteeritud nurga arvutamise valemi abil, et painutamine lõpule viia.
Erinevate painutamisviiside järgi saab jagada nurga painutamiseks, suure kaare painutamiseks, lamendamiseks jne, mille nurga painutamine jaguneb ülespoole painutamiseks ja allapoole painutamiseks.
Ülemine pressimisüksus
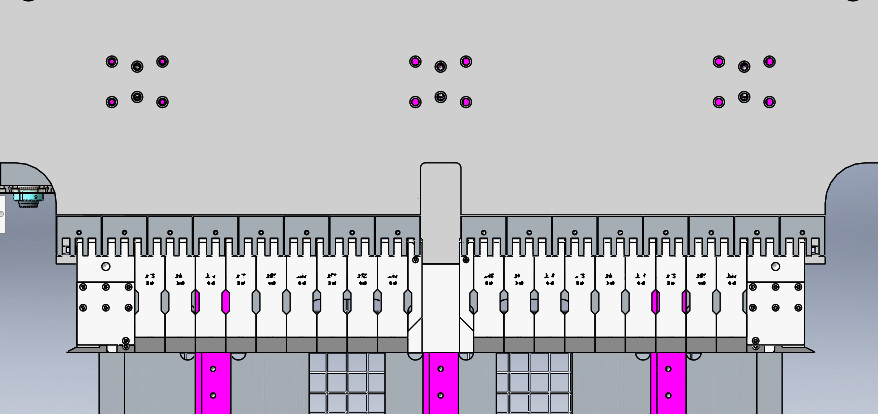
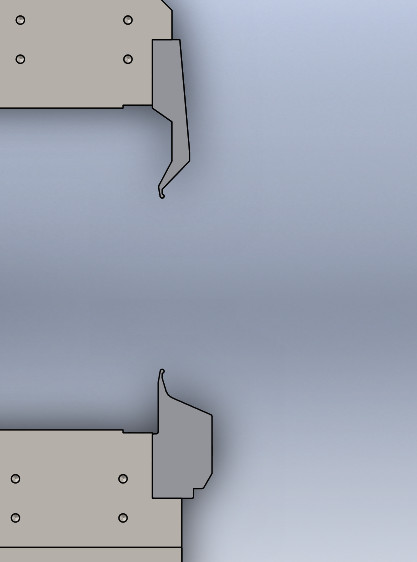
Joon.6 Ülemine pressimisseade
Ülemine pressiüksus: osa kõigist painutusprotsessidest, EmbC täisservo mitmepoolne painutuskeskus on varustatud spetsiaalse ülemise pressimisseadmega, mida saab paigaldada ja käsitsi reguleerida erinevatele plaadipikkustele.
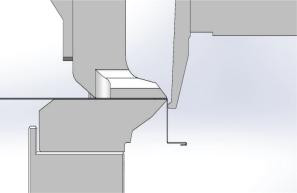
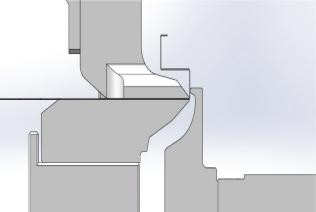
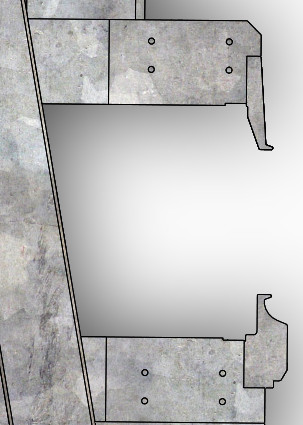
Vältimispainutuskasti nõuete täitmiseks oleme välja töötanud spetsiaalse vältimisvormi.Enne vajutamist on vältimisvormi osa diagrammil vajutamiseelses olekus ja söötmine algab.Pärast söötmist on see diagrammil vajutamise järgses olekus ja algab painutamine.Pärast painutamist liigub ülemine liugur.Ülemise liuguri liikumise ajal liigub osa A automaatselt enne vajutamist olekusse.Kui ülemine liugur on seatud asendisse liikunud, algab järgmine liikumine.
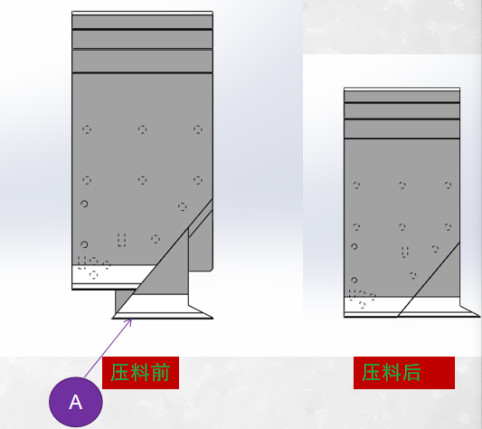
Joon.7 Painutuskasti vältimine
Tööriist
Painutustööriistad jagunevad ülemisteks painutustööriistadeks ja alumisteks painutustööriistadeks.Spetsiaalseid painutustööriistu saab kohandada vastavalt kliendi erinevatele nõudmistele.
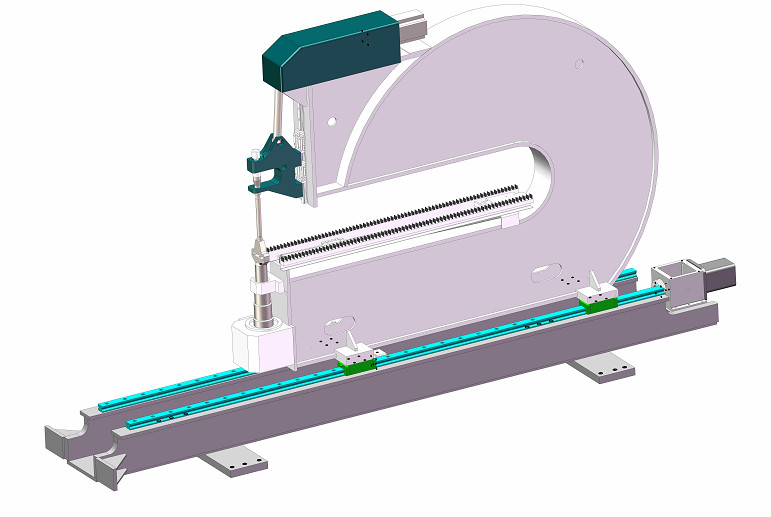
2. Taldriku etteandeüksus:
Lehtmetalli liikumist, kinnitust ja pöörlemist juhivad vastavalt robot 1, kinnitusseade 2 ja pöörlev ketas 3.Kogu töötlemisprotsessi jooksul juhitakse lehtmetalli etteandmist servomootoritega, võimaldades automatiseerimist ja kiiret positsioneerimist, vähendades liikumisaega ja suurendades efektiivsust.Tänu struktuuriuuendustele ja täieliku servojuhtimise rakendamisele suudab lehtmetalli kinnitus ja pöörlemine säilitada täpsust kogu mitmepoolse painutuskeskuse tööprotsessi vältel.Paljude keerukate, isegi hulknurksete toorikute puhul saab tagada pideva pöörlemise täpsuse 0,001.
3. Plaadi positsioneerimisüksus:
Plaadi positsioneerimisüksus koosneb vasakpoolsest positsioneerimistihvtist, parempoolsest positsioneerimistihvtist, eesmisest positsioneerimistihvtist ja tagumisest positsioneerimistihvtist;vasak- ja parempoolsed positsioneerimistihvtid asetavad plaadi vasakule ja paremale.Eesmine positsioneerimistihvt ja tagumine positsioneerimistihvt juhivad plaadi eesmist ja tagumist asendit ning tagavad plaadi paralleelsuse ülemise ja alumise pressnoaga, mida kasutatakse plaadi positsioneerimise täpsuse tagamiseks.
Plaadi positsioneerimisüksus suudab plaadi automaatselt positsioneerida ja mitmepoolse painutamise korraga automaatselt lõpule viia, mis lühendab oluliselt painutustsükli aega, kontrollib plaadi nihkeviga esimesel painutamisel ja tagab painde täpsuse.
4.CNC süsteem
V: Ühiselt väljatöötatud CNC-süsteeme ja tarkvara saab kiiresti ja lihtsalt rakendada ja hallata
B: Põhiomadused.
a) .Kõrge häirekindlusega EtherCAT siini juhtimismeetod
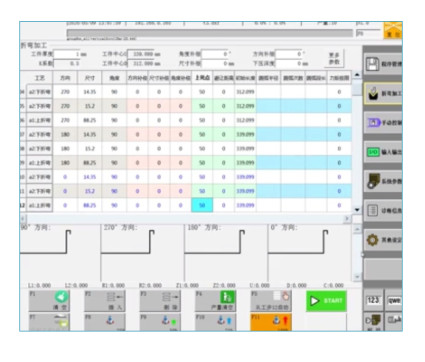
b) Toetab otsest programmeerimist, vormi saab sisestada iga sammu paindeandmed
c) Tugi kõveraks painutamiseks
d) Täiselektriline servojuhtimine
e) Painde kompenseerimise tugi
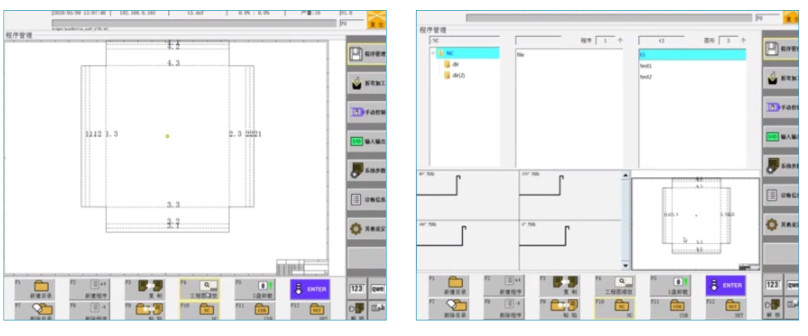
f) Kahemõõtmelise programmeerimise tugi
2D programmeerimisfunktsioon, importige 2D DXF joonistusandmeid, genereerige automaatselt painutusprotsess, painde suurus, paindenurk, pöördenurk ja muud andmed.Pärast kinnitamist saab läbi viia automaatse painutustöötluse
Põhiosa loend
| Ei. | Nimi | Bränd |
| 1 | Raam | Tarkus |
| 2 | Tööriist | Tarkus |
| 3 | Painutusüksus | Tarkus |
| 4 | CNC süsteem | Tarkus |
| 5 | Servo mootor | Tarkus |
| 6 | Servo juht | Tarkus |
| 7 | Raudtee | Tarkus |
| 8 | Kuulkruvi | Tarkus |
| 9 | Reduktor | Taiwan |
| 10 | Katkestaja | Schneider |
| 11 | Nupp | Schneider |
| 12 | Elektriline osa | Schneider |
| 13 | Kaabel | Yicu |
| 14 | Läheduse lüliti | Omron |
| 15 | Laager | SKF/NSK/NAICH |
4) Tööpingi projekteerimine, tootmine, kontrollimine ja paigaldamine vastavad järgmistele standarditele.
1, GB17120-1997
2、Q/321088JWB19-2012
3, GB14349-2011
Varuosade ja tööriistade nimekiri
| Ei. | Nimi | Qt. | Märkus |
| 1 | Tööriistakast | 1 | |
| 2 | Paigaldage padjake | 8 | |
| 3 | Inner kuuskantvõti | 1 komplekt | |
| 4 | Käsitsi tankimispüstol | 1 | |
| 5 | CNC süsteemi käsiraamat | 1 | |
| 6 | lahtine mutrivõti | 1 |





